Sanika Karode
Georgia Institute of Technology — Mechanical Engineering
About Me
Passions
Medical Robotics, AI/ML, CAD Design, and bridging the gap between hardware and intelligent software.
Skills
Programming: MATLAB, Arduino, Java, Python, MS Office Suite
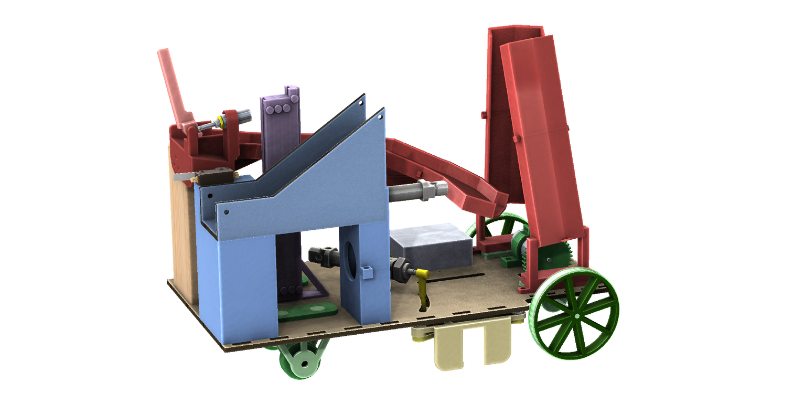
CAD & Design: CATIA, SolidWorks, Fusion 360
Fabrication: 3-D Printing, Laser Cutting, Mechanical Assembly, Rapid Prototyping
CAD & Design: CATIA, SolidWorks, Fusion 360
Fabrication: 3-D Printing, Laser Cutting, Mechanical Assembly, Rapid Prototyping
Education
4.0 GPA
Pursuing a bachelor's in Mechanical Engineering with a minor in Computing and Intelligence
Expected Graduation: Dec 2027
Pursuing a bachelor's in Mechanical Engineering with a minor in Computing and Intelligence
Expected Graduation: Dec 2027
Clubs & Involvement
Hytech Racing: Mechanical Controls team member using CATIA for CAD/FEA on performance-critical components.
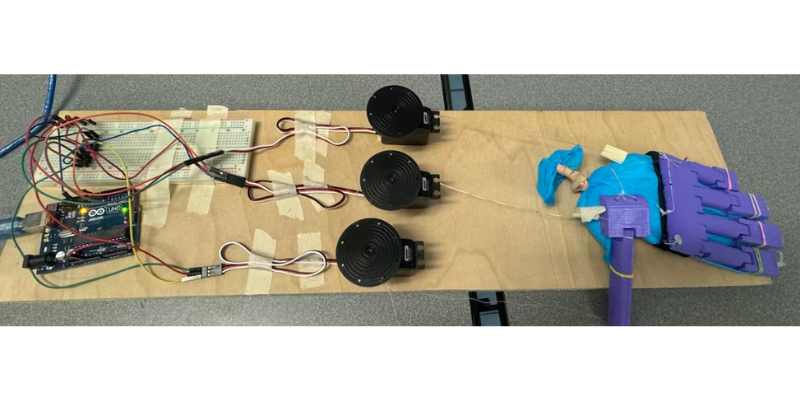
Project Limbo: Designing a robotic arm exoskeleton for below-elbow amputees.
Pi Tau Sigma: Director of Communications
Project Limbo: Designing a robotic arm exoskeleton for below-elbow amputees.
Pi Tau Sigma: Director of Communications
Interests
Outside of engineering, I'm an avid tennis player, gym enthusiast, and I love crafting.